|
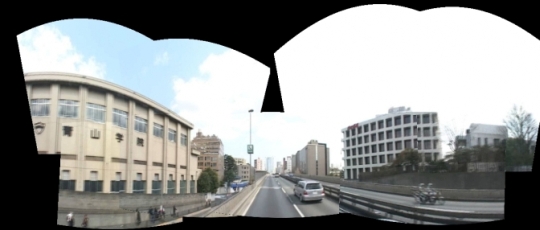
This research is about synthesizing multiple video streams into a single omni-directional video stream.
For the synthesized video streams to be accurate,
arranging the cameras so that thier optical centers coincide is necessary.
However, with most cameras the optical center is inside the of a camera,
making it physically impossible to arrange them in the necessary way.
To overcome this problem, we place the cameras so that their optical centers all
lie on a straight line in the driection that the vehicle will move. This way, an acurate omnidirectional image
can be constructed by combining images taken from each camera as it passes through a common location. Knowing when a camera is
at the common location is important, and can be found by space-time analysis.
|
 |
This method can be applied to space-time calibration by space-time image analysis.
If the cameras cover the measurement area,
this method can produce robust results even when the camera positions are unknown.
One of the feature of this method is that it can generate continuous omni-directional images.
Therefore it can get texture of large scale scenes efficiently.
Publications
-
Ryota Matsuhisa , Shintaro Ono,Hiroshi Kawasaki,Atsuhiko Banno,Katsushi Ikeuchi
"Structure from Motion for omnidirectional images using efficient factorization method based on virtual camera rotation"
International Workshop Computer Vision and Its Application to Image Media Processing, (CD-ROM), pp.1-7, 1.2009
-
Kawasaki Hiroshi, Ikeuchi Katsushi, Sakauchi Masao
"Super-resolution Omnidirectional Camera Images Using Spatio-temporal Analysis"
Electronics and Communication in Japan, Part3, Vol.89, No.6, pp.47-59, 2.2006
-
Ikeuchi Katsushi, Sakauchi Masato, Kawasaki Hiroshi, Sato Imari
"Constructing Virtual Cities by Using Panoramic Images"
Internaional Journal of Computer Vision, Vol.58, No.3, pp.237-247, 7.2004
-
Kawasaki Hiroshi, Miyamoto Atsunori, Ohsawa Yutaka, Ono Shintaro, Ikeuchi Katsushi
"Multiple Video Camera Calibration using EPI for City Modeling",
Proceedings of Asian Conference on Computer Vision, Vol.1, pp.569-574, 1.2004
-
Ono Shintaro, Kawasaki Hiroshi, Hirahara Kiyotaka, Kagesawa Masataka, Ikeuchi Katsushi
"Ego-Motion Estimation for Efficient City Modeling by Using Epipolar Plane Range Image",
Proceedings of 2003 World Congress on Intelligent Ttansport Systems (ITSC2003),, (CD-ROM), pp.1-12, 11.2003
-
Kawasaki Hiroshi, Yatabe Tomoyuki, Ikeuchi Katsushi, Sakauchi Masao
"Construction of a 3D City Map using EPI Analysis and DP Matching"
Proceedings of Asian Conference on Computer Vision, Vol.2, pp.1149-1155, 1.2000 (Honorable Mention for Best Paper Award of ACCV2000)
|


