| Unified Underwater Structure-from-Motion |
|
Recently, demands on underwater 3D reconstruction are rapidly growing in the field of robotics, marine biology, sports science, and so on.
Structure-from-Motion (SfM) is known to be a powerful technique for underwater 3D reconstruction, attracting wide attention in that it should assume non-centraol projection model considering light refraction on water surface.
On the other hand, underwater SfM research is biased toward the premise of geometry that flat refractive interface is fixed facing the front of camera. There have been few studies assuming other case where refractive interface moves or surface does not satisfy planarity (such as rippling water surface) (Table 1). 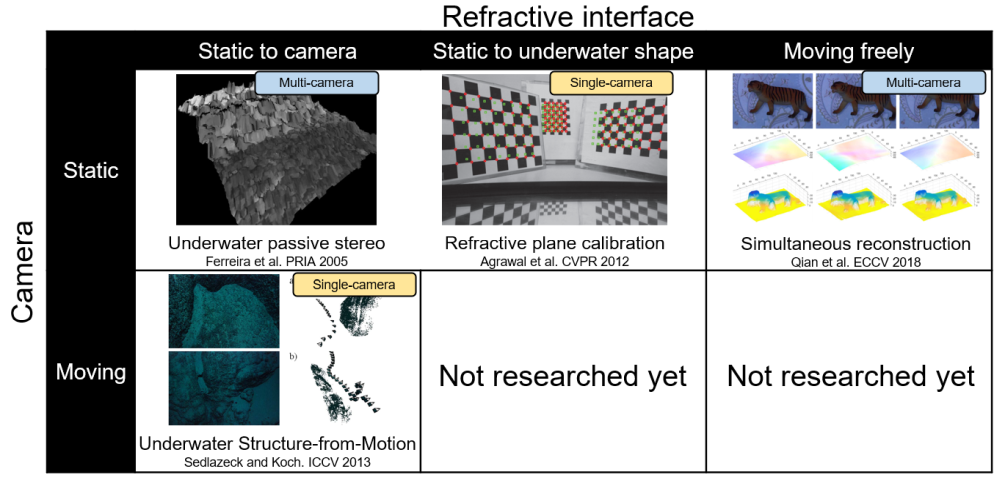
Unified Underwater SfM Model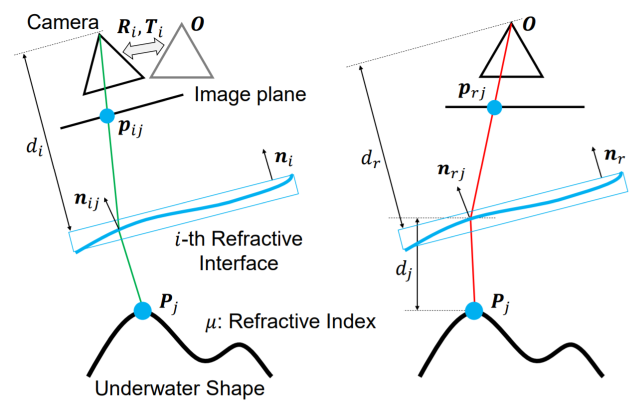
All the scenarios on Table 1 can be represented as specialized cases of this model. For example, it is equivalent to general underwater SfM geometry assumption when distance between camera and refractive interface is constant, and all the normal on refractive interface is facing the front of camera. Optimization AlgorithmIn many optimization algorithms for 3D reconstruction such as bundle adjustment, generally reprojection error by forward projection is minimized. However, analytical forward projection is not possible in this model since refractive interface has different normal for each position (incontinuous). Instead, we use a constraint that muptiple light rays projected from each 2D points on image intersect at certain 3D point.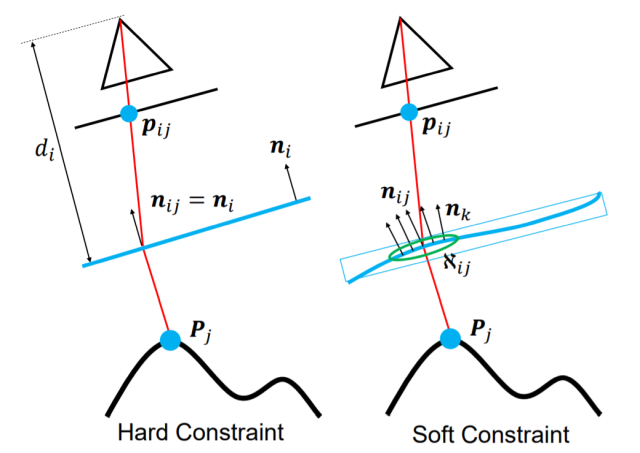
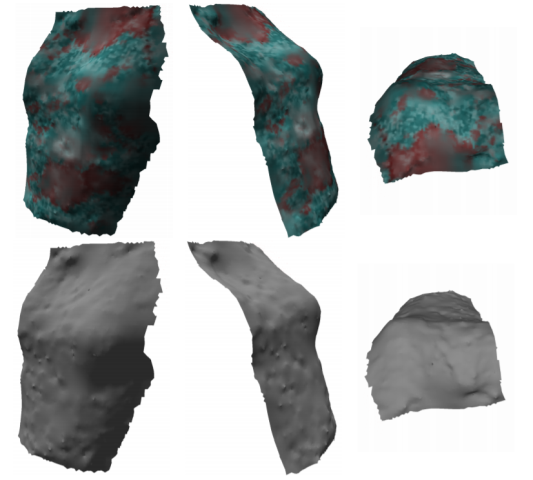
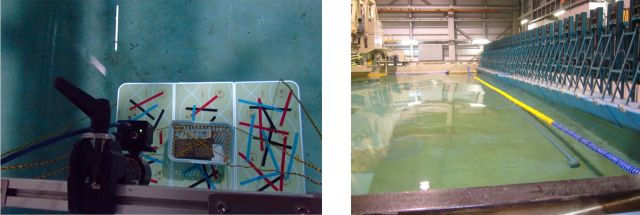
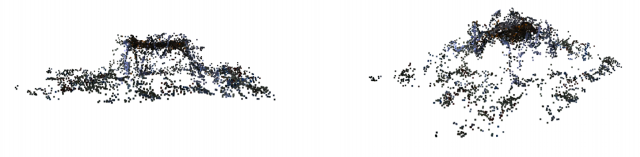
Underwater SfM Reconstruction ResultsFollowings are reconstruction results obtained from our unified underwater SfM model and optimization algorithm.
Publications
|
| Kawasaki Laboratory |