| マーカレス・モーションキャプチャと光学式モーションキャプチャ間のキャリブレーション手法 |
|
概要
マーカレス・モーションキャプチャによる人体計測のニーズが高まっている.本研究では,6 台のキャリブレーション済みの RGB カメラを使用した,マーカレス・モーションキャプチャシステムを用いて,マーカを用いる光学式モーションキャプチャシステムと同等の計測を目指した.本手法を以後 MV-OpenPose と表記する.MV-OpenPoseにおける課題点として,MV-OpenPoseで使用する座標空間と一般的な光学式モーションキャプチャシステムの座標空間が異なると言う点が挙げられる.そこで,本研究の目的は,MV-OpenPoseで取得された各関節座標を光学式モーションキャプチャシステムにおける座標空間に変換することで位置合わせを行うということである.
MV-OpenPose
MV-OpenPoseとは,6台のRGBカメラによるマーカを使用しないモーションキャプチャシステムである.
以下の図のように撮影対象を囲むようにカメラを配置することで三角測量の原理を利用して3次元での各関節の座標の推定を行う
各RGBカメラ画像からOpenPoseにより骨格の2次元点を推定し,複数の点から三角測量の原理を用いることで3次元点を推定することができる.1つ先のカメラでも三角測量により3次元点を推定しその平均値を使用することで,計測の精度を向上させることができる.

以下に示した図は,実際にMV-OpenPoseを活用してモーションキャプを行っている様子及びそのキャプチャ結果の一例である. 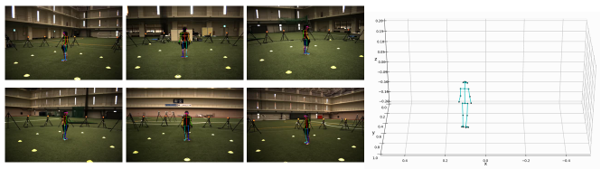
ICPアルゴリズム
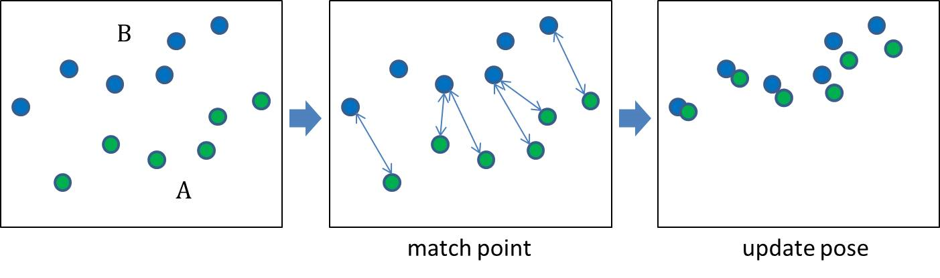
提案手法にて,ICPアルゴリズムを活用している.ICP(Iterative Closet Point)とは,2 つの点群が整合するようにその位置姿勢の関係を調整する方法の1つで,繰り返し計算に基づいて段階的に位置姿勢を調整する手法である.
位置合わせの手順
位置合わせの手順は,手動でおおまかな位置合わせを行いICPの初期値を設定する手順及び,ICPアルゴリズムを使用して詳細な位置合わせを行う手順を示す.
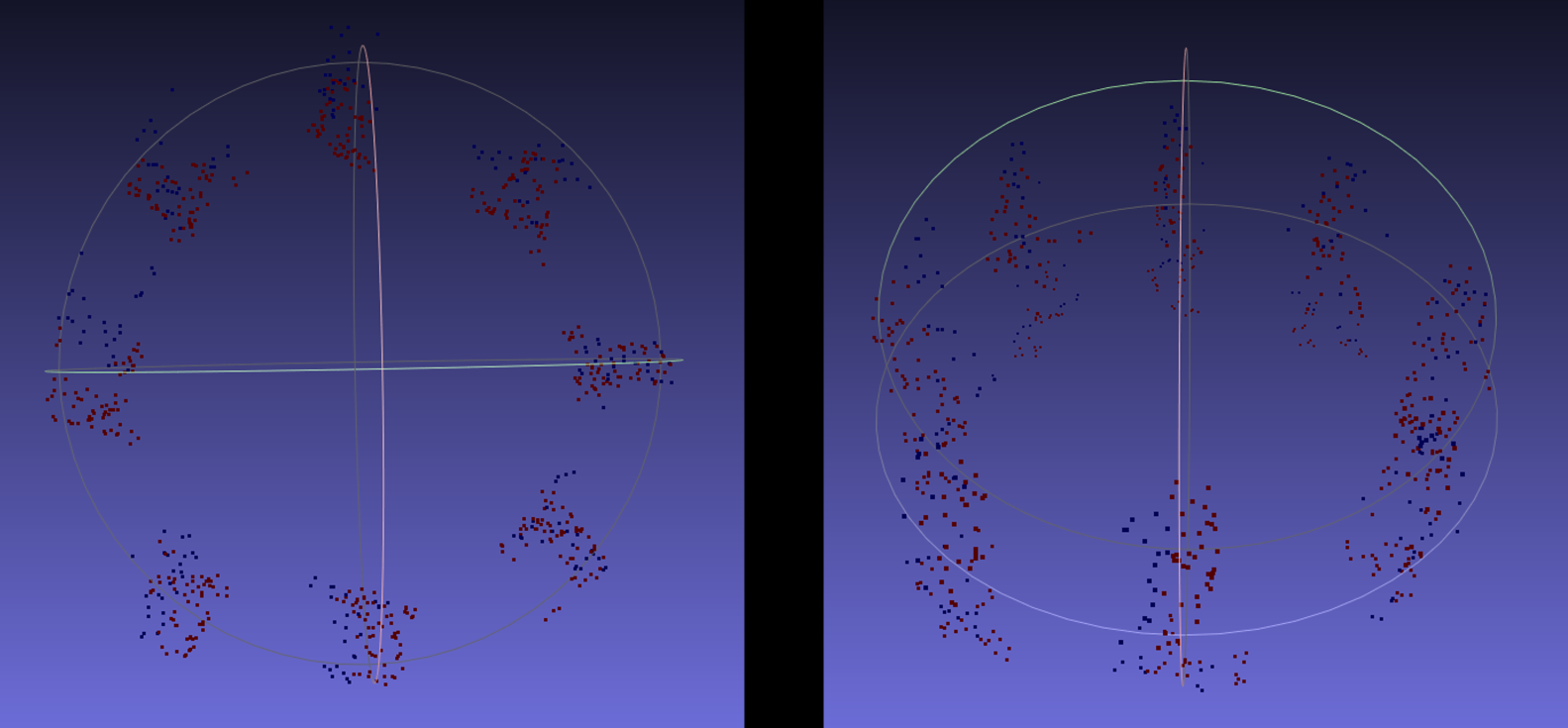
(赤:光学式モーションキャプチャ,青:ICP前のMV-OpenPose,黒:ICP後のMV-OpenPose) 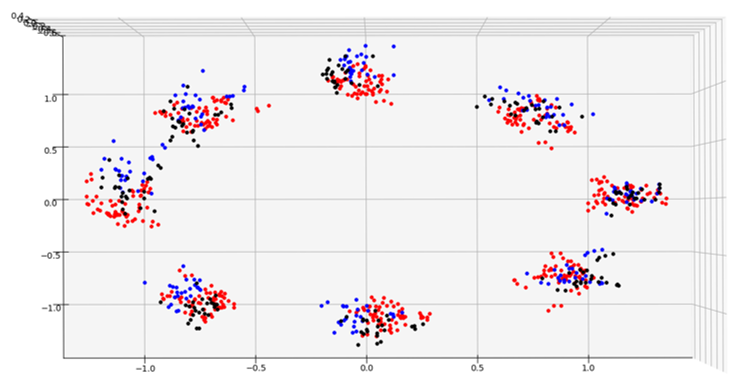
実験結果
上記の提案手法による2つのモーションキャプチャシステムの位置合わせを,2つのシチュエーションにて検証を行った.1つ目の動作は,円を描くようにゆっくりと歩行すると
いった動作である.動作が比較的単純であるためか,2つのモーションキャプチャのデータはかなり高い精度で一致していることが分かる.2つ目の動作は,アクロバットな動きで逆立ちをした状態で回るといった動作である.逆立ちや回転といった複雑で激しい動きを行っているが,2つのモーションキャプチャのデータは十分に一致していることが分かる.しかし,1つ目のシチュエーションと比べると,ずれが大きくなっているといえる.MV-OpenPoseにおいて一部のフレームで足先が検出されなかったり,明らかにおかしな位置に推定されるといった現象も発生していることが,この検証により確認することができた.
Resources
Publications
|
| Computer Vision and Graphics Laboratory |