| Calibration method for Projector using Checkerboard |
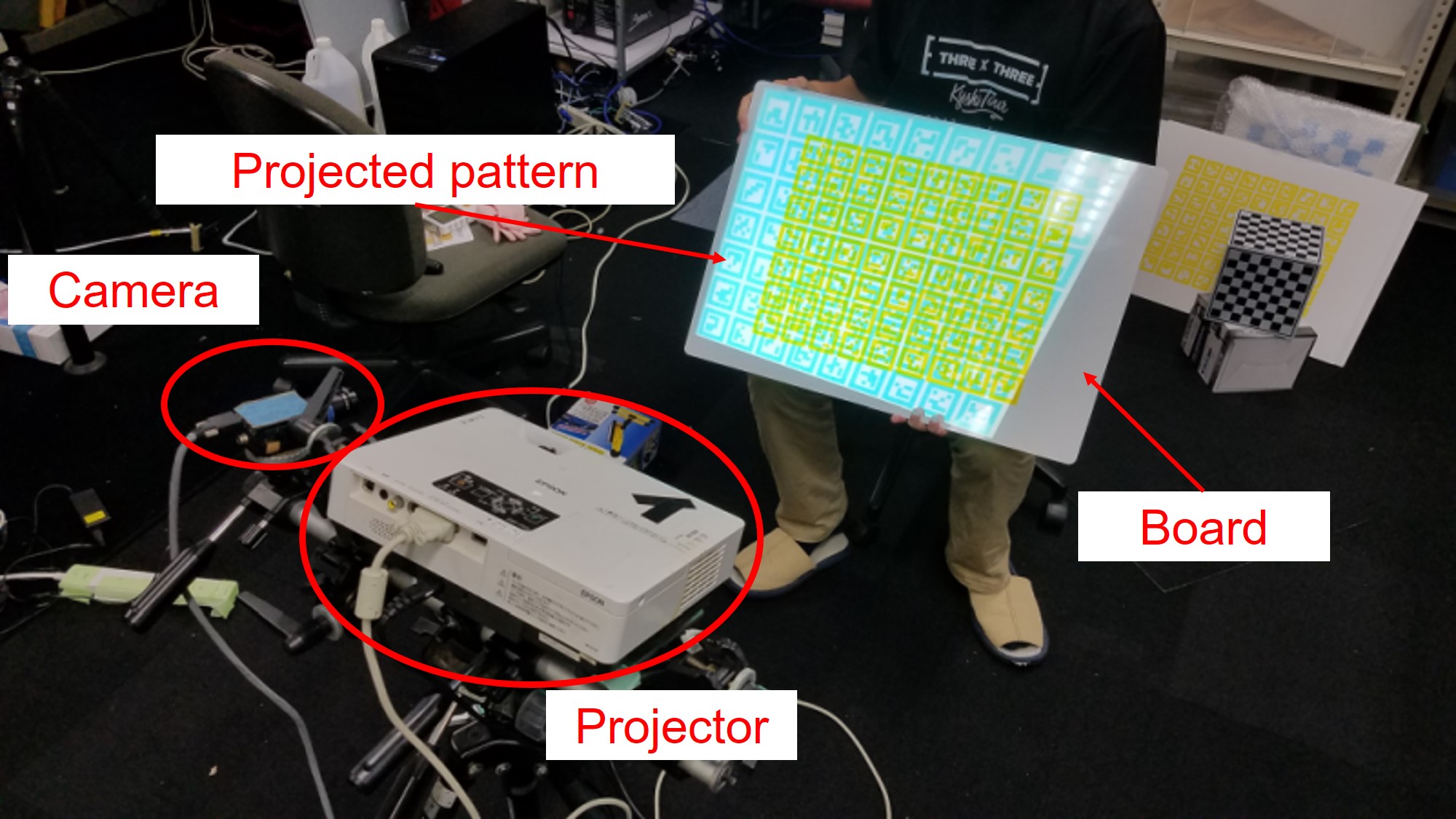
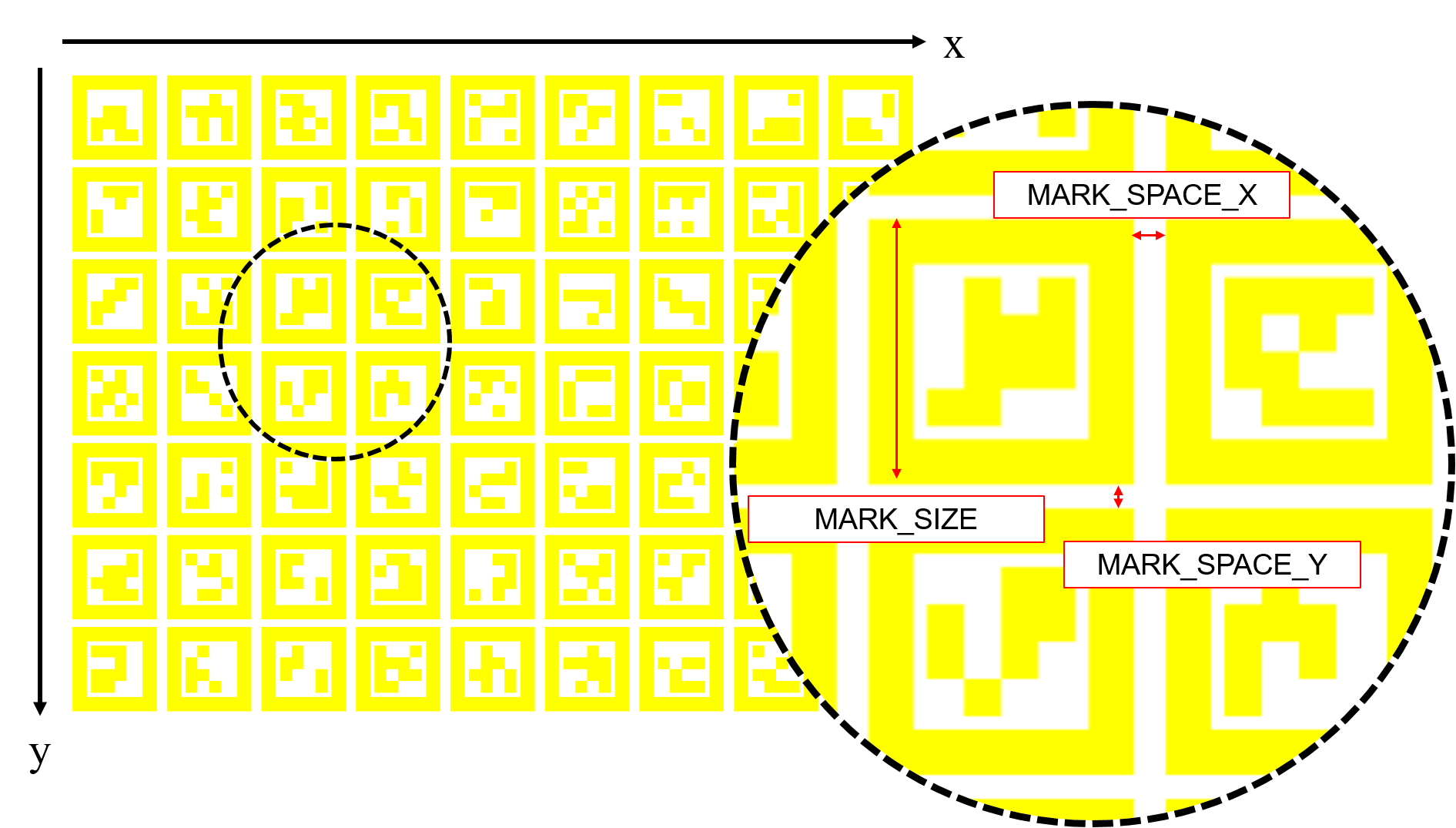
IntroductionOpenCV Camera Calibration has been improved to allow the calibration of the projector using ARtoolkit. This section describes how to use it.MeasurementFirst, perform measurement. Print the yellow AR marker pattern on a paper and stick it on a flat plate (image is include in the downloaded zip file). Holding this plate, project a cyan AR marker pattern on the plate from the projector (if the pattern is too big, use the small pattern). Take pictures by changing the angle of the plate. To obtain an accurate result, it is better to take more than 40 measurements. Save the images as bitmaps.For measurementFor the calibration of the projector, arrangement of the camera and the projector is as shown below. The camera should be located as close as possible to the pattern. To help you find the corner points, shorten the distance between the camera and the projector, when you get the images (to increase the accuracy of the intrinsic parameters). Unlike checker pattern, you don't have to care if the pattern is inside a image or not.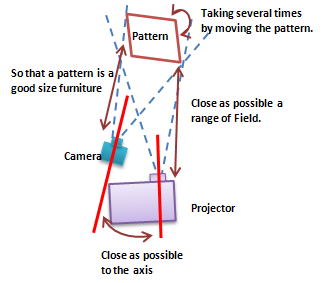
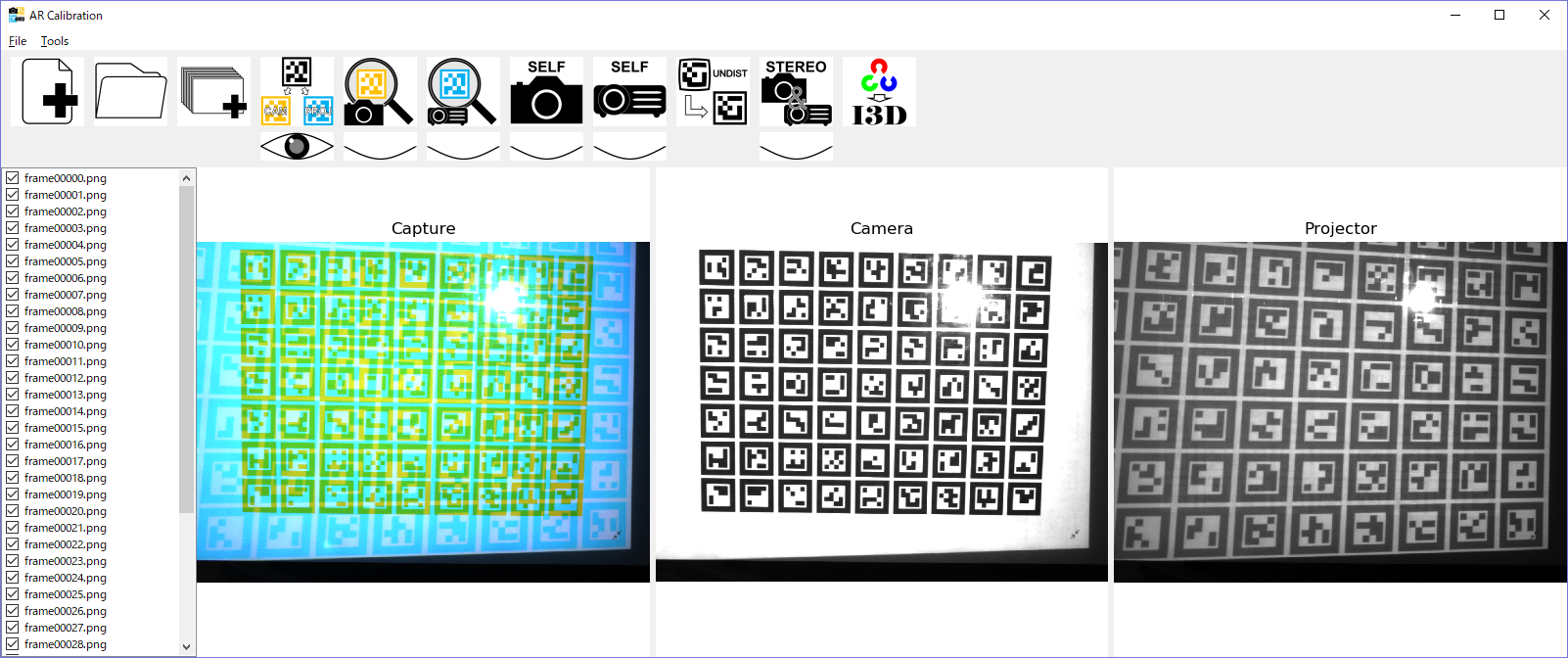
Start Calibration ProcessRun the exe fileRun ARCalibGUI.exeCommand prompt starts, and after a while the AR Calibration window appears(It may take a few minutes to start up). Button Name
Create ProjectChoose "File -> New Project" or the "New Project" button to create a project. Here, recommend that you make new directory for this calibration project.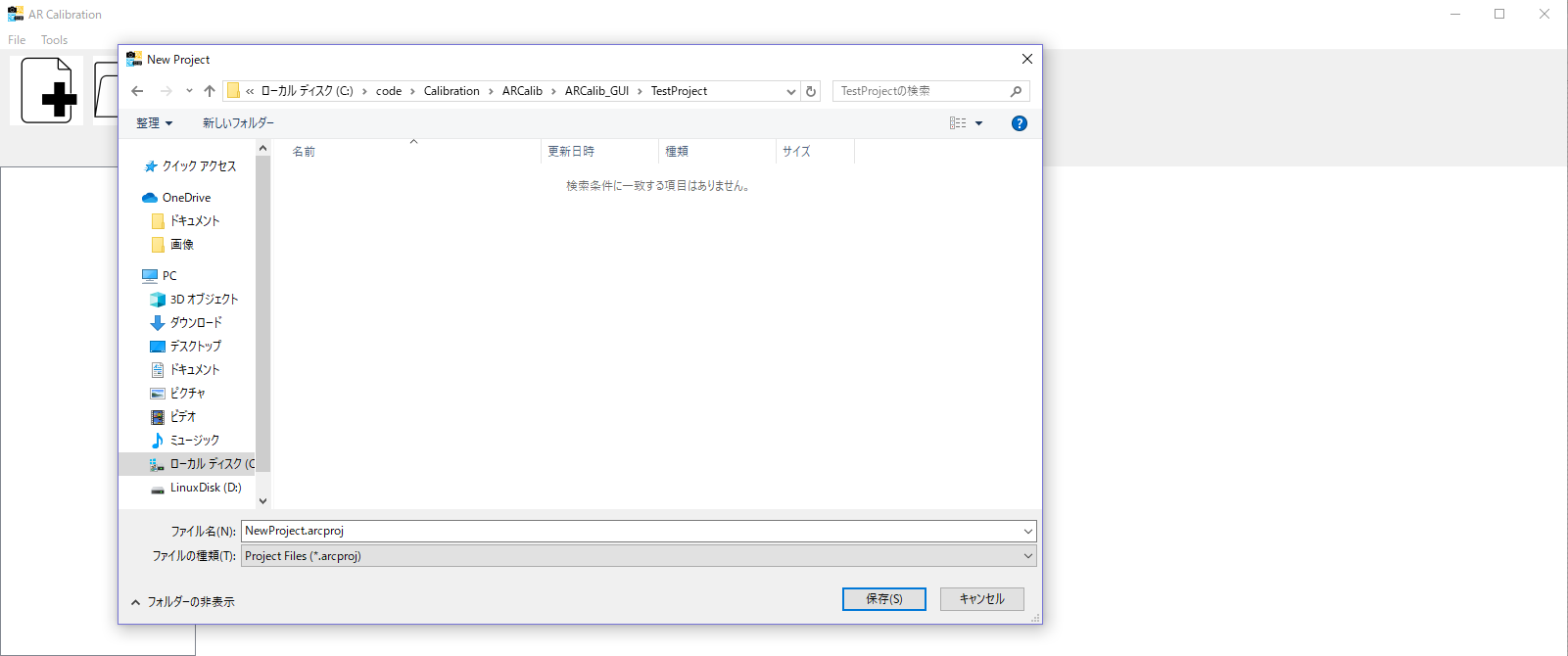
Load captured images & color isolationAfter make project, click the "Open images" button to choose a directory that has pictures which you took just now. And then click "isolation" button to color isolation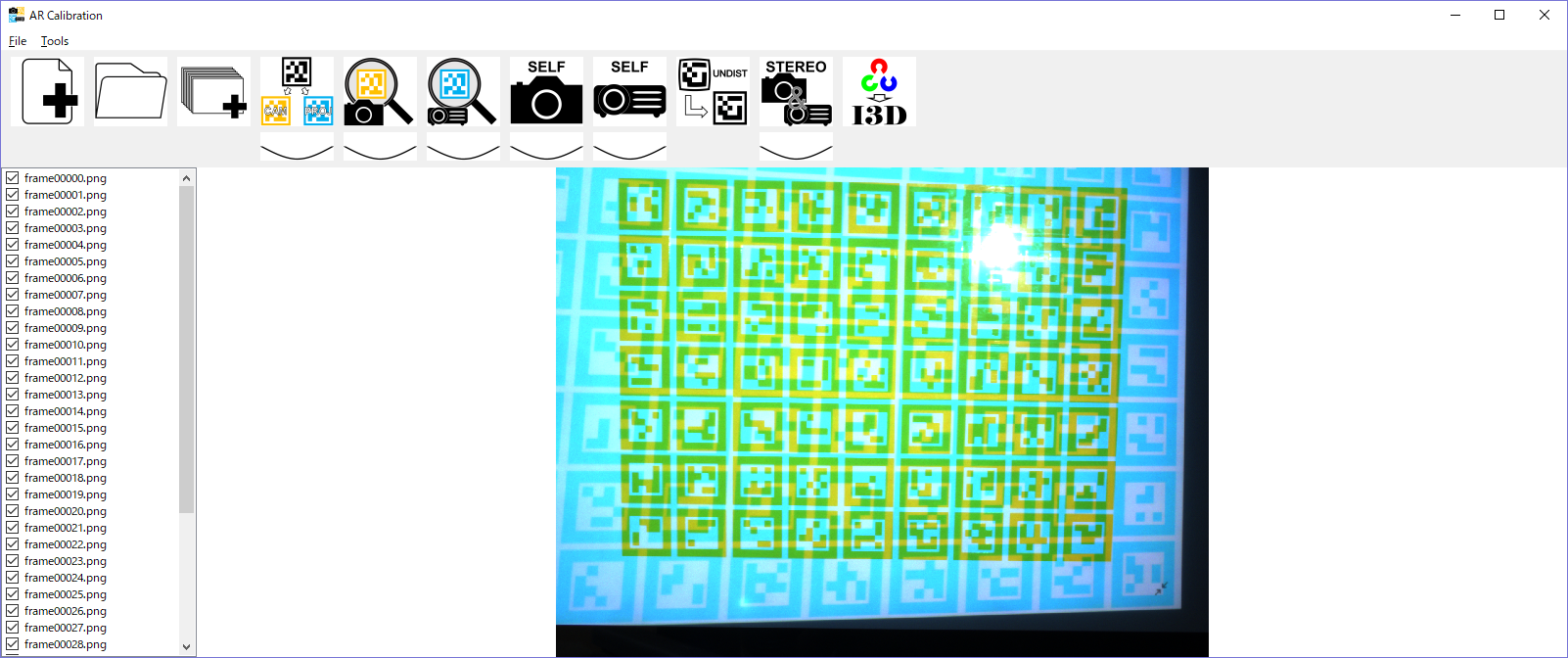
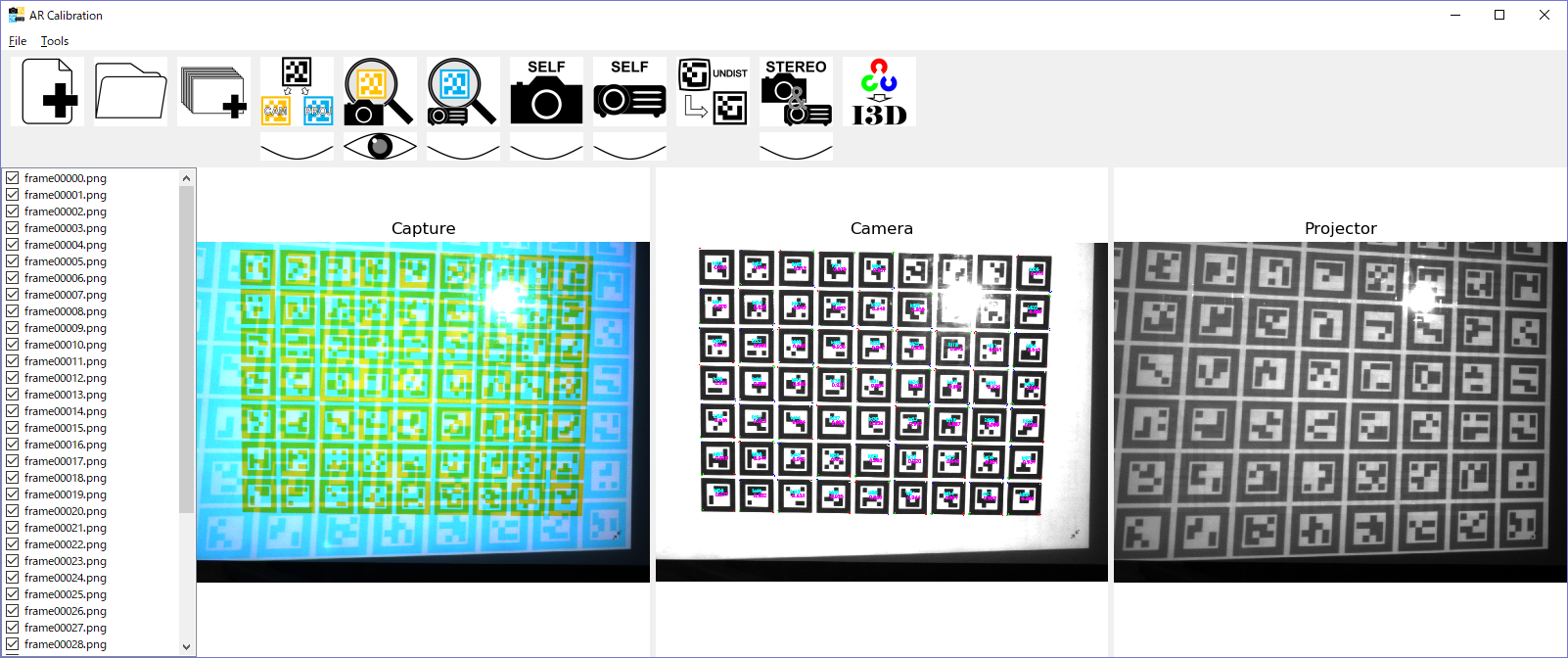
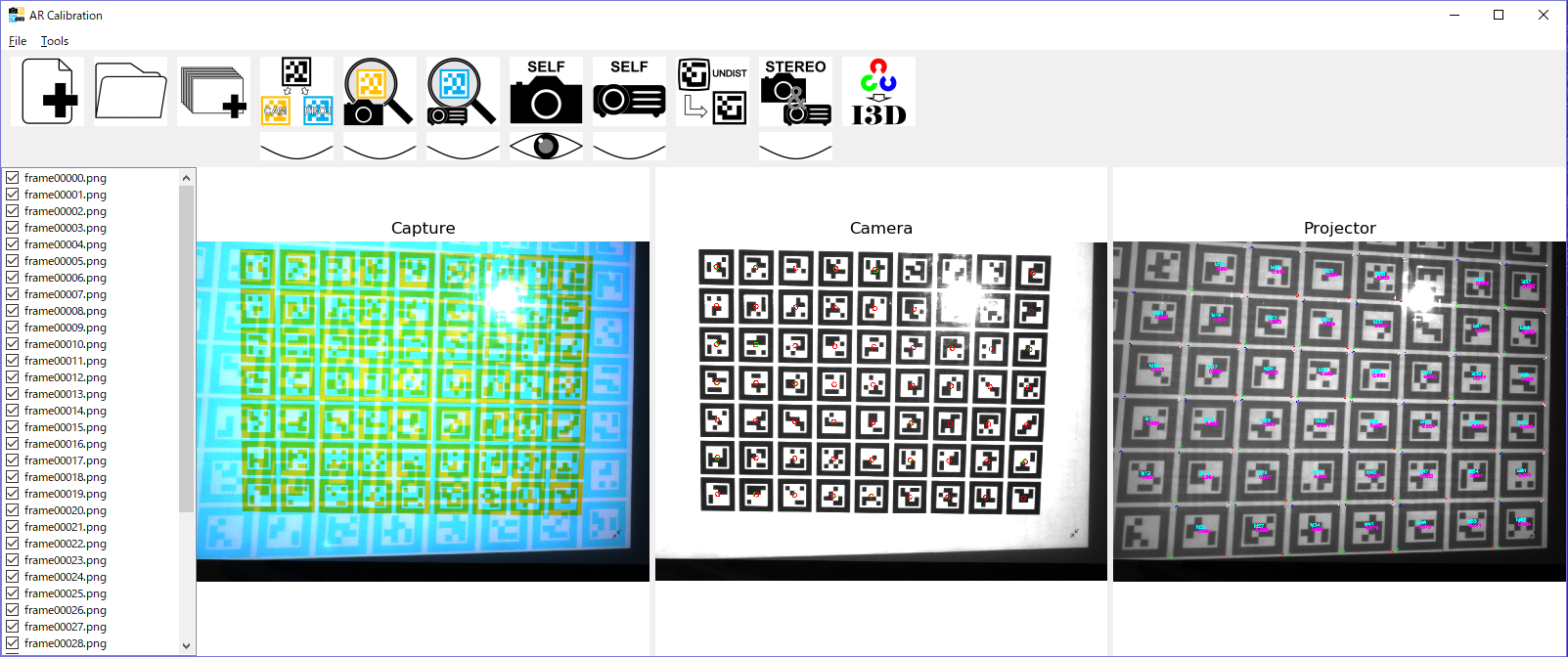
Detect AR markerClick "detect Cam" button to detect AR marker in "Camera~.png". You will find the dialog to determine some paramters. What does each paramter mean is following:
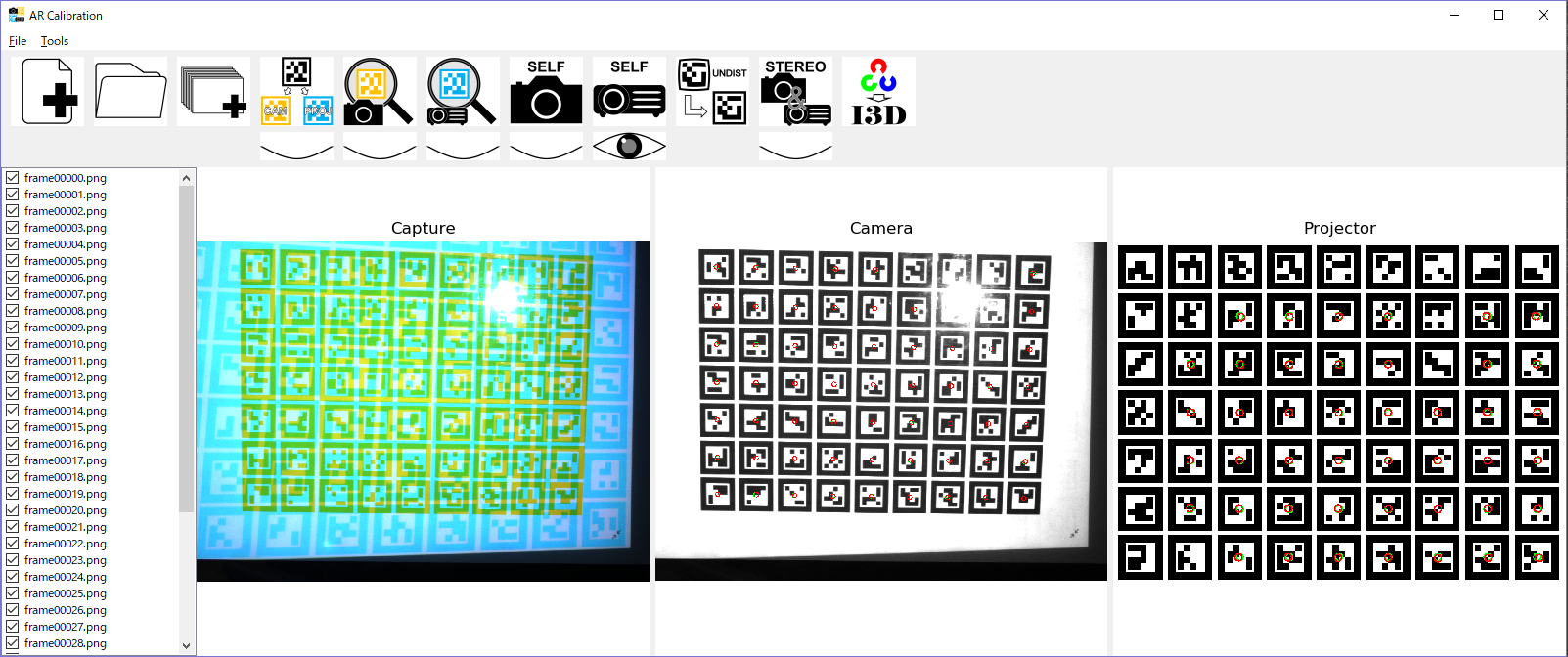
After detect AR marker in "Camera~.png", click "detect Proj" button to detect AR marker in "Projector~.png". Same dialog as "detect Proj" will pop up. 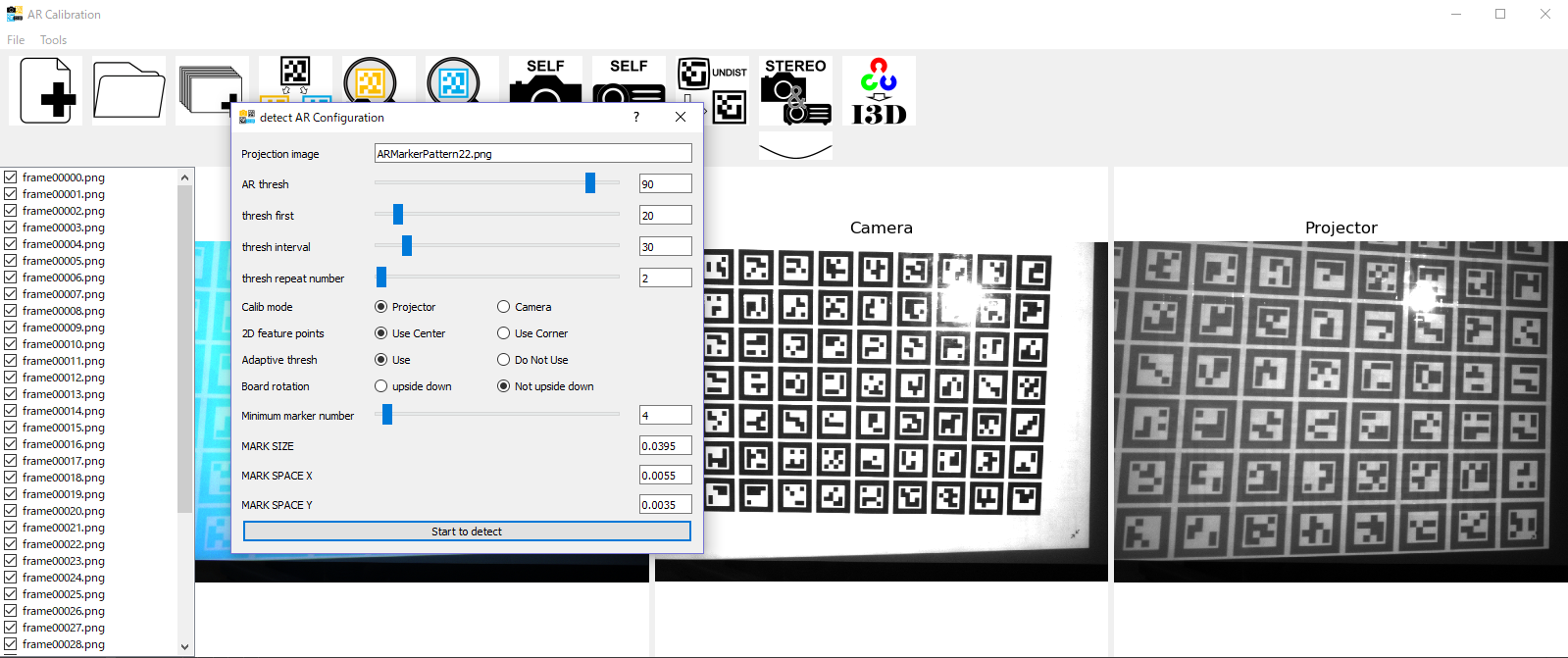
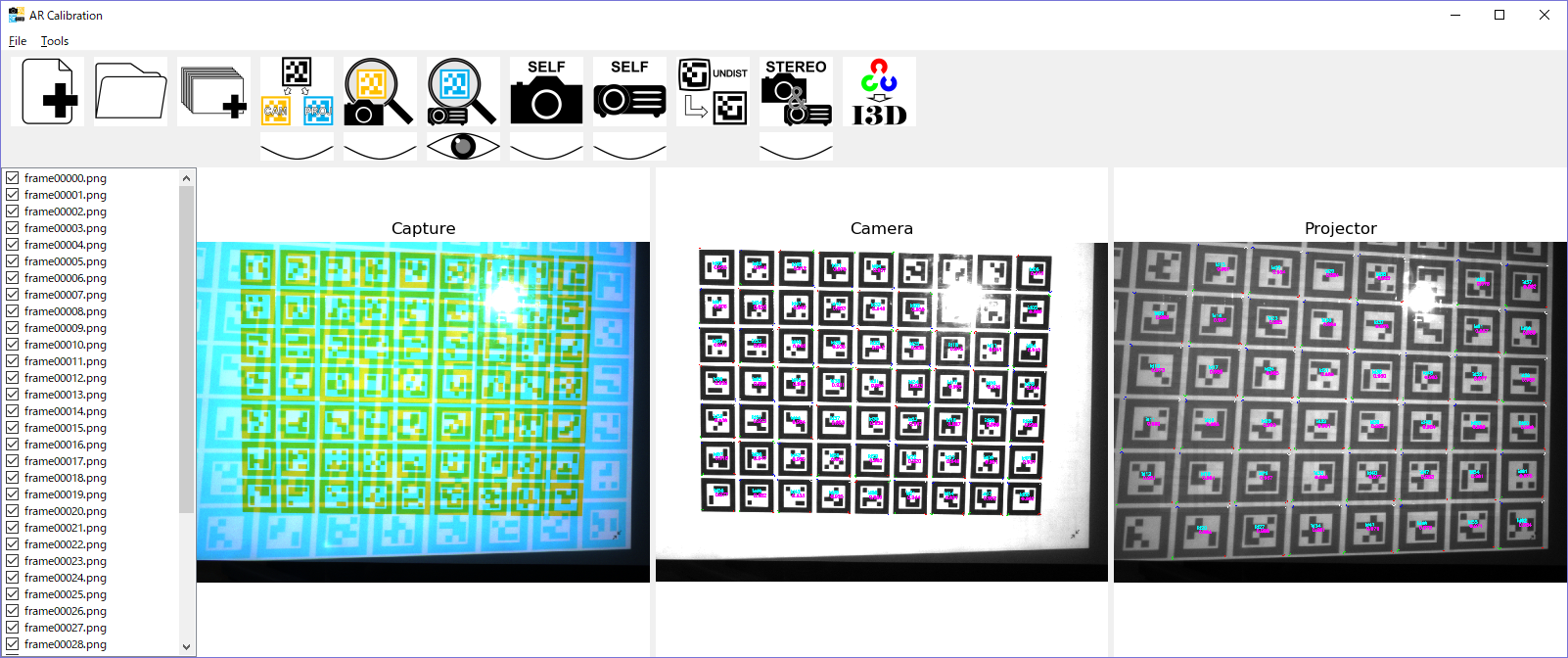
Self calibrationClick "Cam self calib" button. If you want to calculate distortion paramters, check "ON" button in a dialog. Click "Start selfcalib". After self calibration, you get images which have reprojected feature points. Next, click "Proj self calib" button. Here are no dialog because projector doesn't have distortion. (Actually, because self-calibration will be done in next step, this step is not necessary but for check the accuracy of detection.)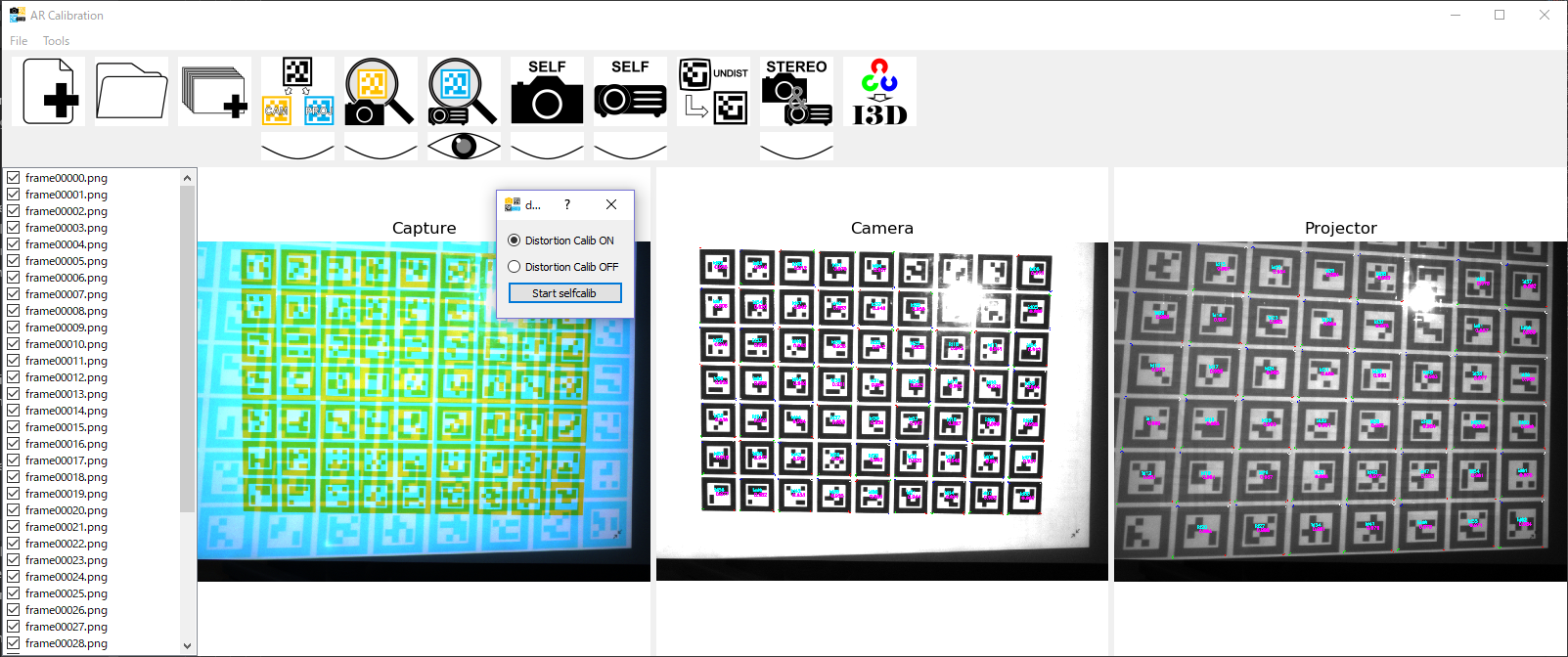
Undistortion (Option)If you calculate distortion paramters in the previous step, click "Undistort points". You get undistorted feature points.Stereo calibrationClick "Stereo calib". You get intrinsic paramters of camera and projector and extrinsic paramter between camera and projector.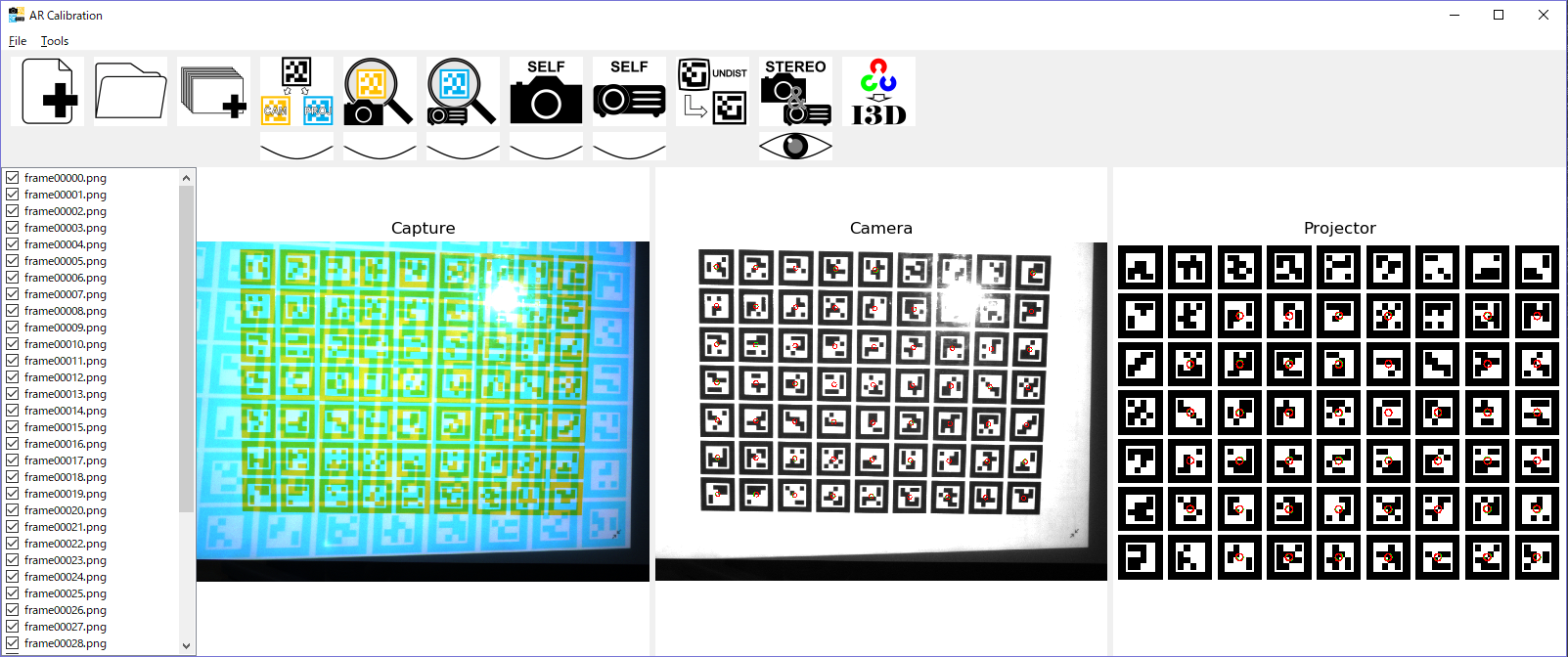
Convert parameter format from OpenCV to I3DClick "convert openCV to I3D". Each paramter is output to 'param' directory.
<focal length> <distortion parameter> <pixel size(x)> <pixel size(y)> <principal point(x)> <principal point(y)> <width> <height> The contents of extrinsic parameter are following. <translation(x)> <translation(y)> <translation(z)> <rotation in euler angle(x)> <rotation in euler angle(y)> <rotation in euler angle(z)> Here, project file for I3D is created in the parent directory of AR Calibration project. When you use I3D, you must modify pathes of images. Release note & DownloadAR Calib by Python and OpenCV and AR toolkit: version 0.3.11 2020.09.02Sample date for test: Captured on 2017.12.01 FAQ
Publications
|
| Kawasaki Laboratory |